

When i hover my drone and give it a blip of throttle it falls down almost like stalls. Does anyone have any idea as to why this might be happening?
dvr recording of an example in the attached wetransfer file: example.mp4 (safe to click only dvr video)
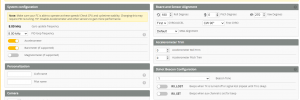
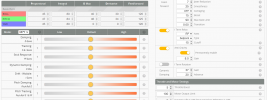
i added some screenshots of betaflight settings. I didnt change any settings when updating the controller only the ports and gyro so it corresponds to drone movement
i am using the geprc cinelog 35
dvr recording of an example in the attached wetransfer file: example.mp4 (safe to click only dvr video)
i added some screenshots of betaflight settings. I didnt change any settings when updating the controller only the ports and gyro so it corresponds to drone movement
i am using the geprc cinelog 35


")
